
WLS robotics formed in early 2021, as Prof. Dr. Stefan May of the OHM university stumbled across an extracurricular technology course offered by our school, the WLS, and decided to lend support and introduce the world of robotics.
We lay focus on creating simple and easy-to-maintain educational robots using ROS, micro-ROS, EduArt's drive system and off-the-shelf electronics. With the goal of acquiring and passing on the skills and knowledge required to work on mobile platforms, be it mechanics, electronics, software or just plain old troubleshooting.
We began our adventure with Zyklop, using a very simple design and purely hardware from EduArt.
It is almost twice as large as the other robots, and won't fit into a RMRC course, but it taught us the basics (and most common issues).
Zyklop repository
Zyklop wiki
Zyklop kanban/TODOs

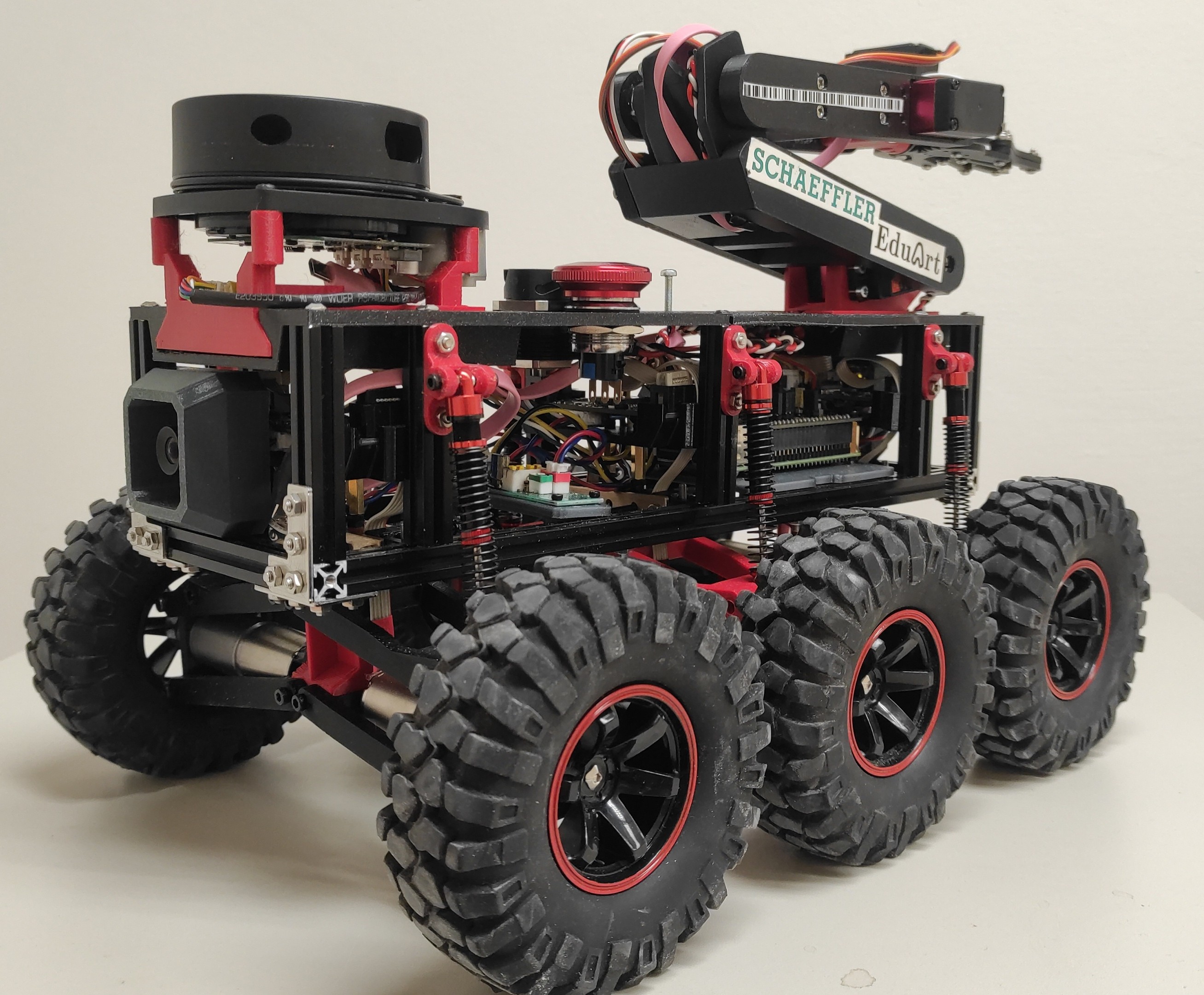
Iterating on what we learned from Zyklop, we built the Bento-Box.
To date this is our most developed robot, with the most features and highest reliability, and champion of the Robocup German open.
Bento-Box repository
Bento-Box wiki
Bento-Box kanban/TODOs

However, Bento-Box really struggles at climbing ledges and stairs. As EduArt offered us new hardware, we decided to try out a flipper-based robot, naming it Schäufele.
We are still learning how to make articulated tracks behave nicely, so Schäufele can be difficult at times. But preliminary results are very promising.
Schäufele repository
Schäufele wiki
Schäufele kanban/TODOs

Frustrated with Schäufele's hard-to-repair design, we decided to rebuild the Bento-Box from scratch.
Introducting The Bento Box Neo, a distillation of all the good choices made in the Bento-Box.
Bento Box Neo repository
Bento Box Neo wiki
Bento Box Neo kanban/TODOs
Originally we changed names and competed with 2 robots simultaneously, but "WLS Robotics",
even though it makes our affiliation with school clear, never really caught on.
Everyone still preferred and used "Team Bento". So we simply changed it back and made a better logo.
All of out robots use the same software design.
We use Docker for everything, where each container essentially runs a master launch file.
The Mapping group is currently Work-in-progress.
