Local or internalised library #147
-
|
Hi,
However, working in a commercial setting, I looking for a possibility to define the robot completely locally, and preferably so, that the robot is internalised into the gh-file itself (much like in Kuka|prc). Is there a possibility to have a local library (with unique names), maybe stored to a server location, other than User/Robots/ ? |
Beta Was this translation helpful? Give feedback.
Replies: 3 comments 9 replies
-
|
Hi @toniosterlund, as you say, if you don't want your robot library to be publicly available, currently the solution would be to create locally the 3dm/xml files placed under the User/Robots/ folder (Documents/Robots in Windows) and distribute these files to other machines, asking the users to copy them to this same location. If you change these files, they will have to copy them again. We could add additional folder locations to check for libraries, these could point to a network drive. We could also add a feature to load a robot system from internalized text and a list of meshes per mechanism. If you are in a commercial setting, are finding the plugin useful, and can afford it, consider sponsoring the project to get your feature requests prioritized. |
Beta Was this translation helpful? Give feedback.
-
|
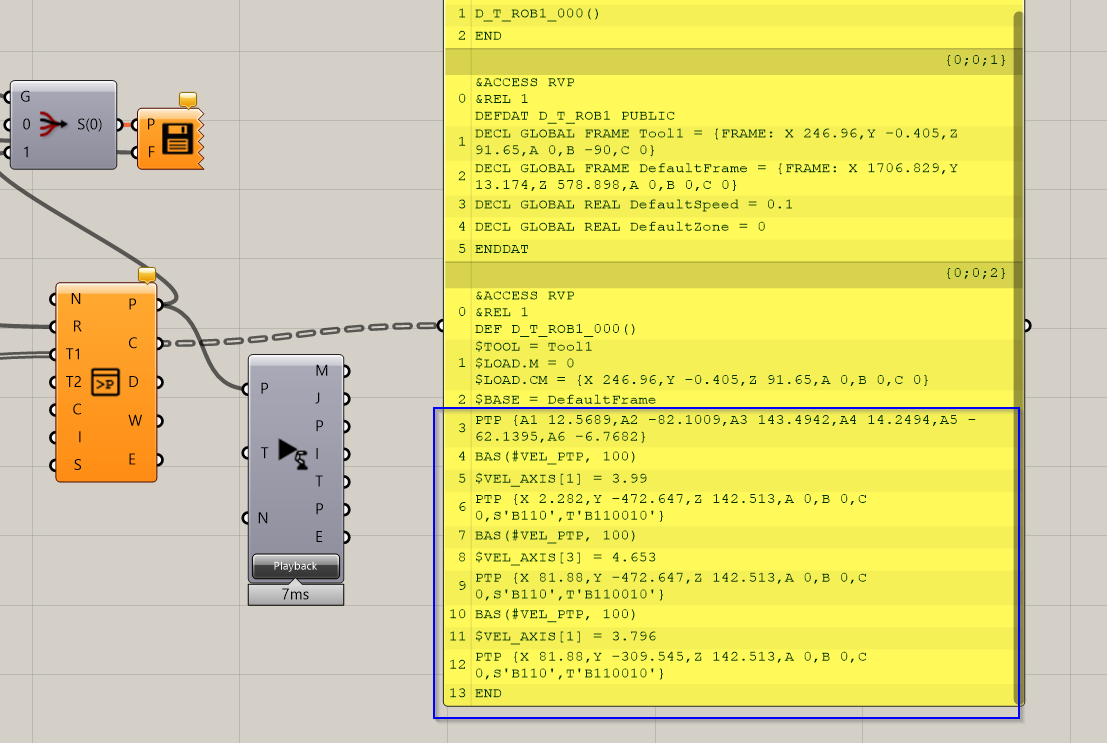
We have the situation vice versa. A couple of people produce toolpaths and the robot has its own operator(s). Few hundred kilometers of physical distance, so I am not anywhere near when the robot is being operated. This means that the operator makes small adjustments to the base all the time in order to match X or Z to the base material being milled. We try to keep the base matching on the simulation end, but a few millimeter mismatches do not matter - as it's just simulation. And in the end, it's the tool's CP that matters. I was looking through the Code output of the 'Create Program' component, and I suppose I could extract and replace the header from the {2} branch and just save that as an src..? Just need to construct my own type of header and save the merged strings as a file. Both would be completely doable. But I actually just realised that the first PTP is given as axis values, when the subsequent ones are XYZabc. Why is that? Is the first automatically considered as Home position? |
Beta Was this translation helpful? Give feedback.
-
|
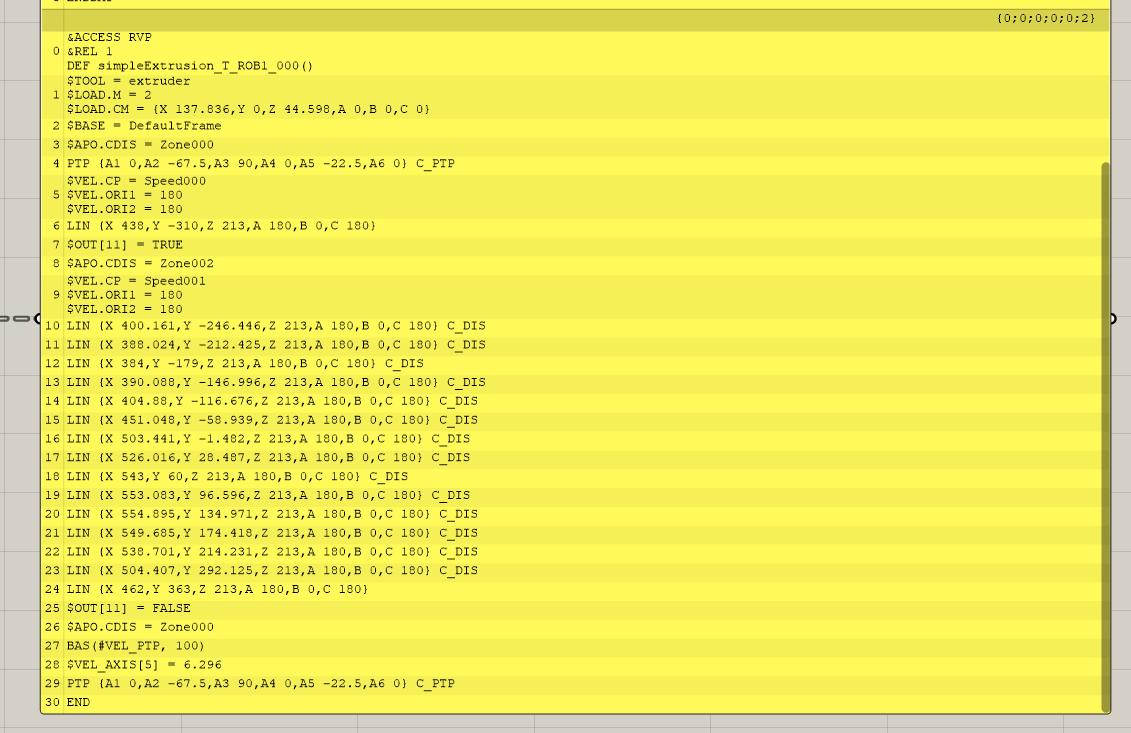
Seems I need to study the plugin further, as the 'Simple example' file gives a neater code on LIN. |
Beta Was this translation helpful? Give feedback.
-
What you can do is:
Yes, the Warnings output should mention that it was changed to a joint target. The reason for this is to make sure the program starts from an unambiguous pose, irrespective or where the robot was before starting the program. With other types of target, the robot might reach it in different ways depending on its previous position. |
Beta Was this translation helpful? Give feedback.
-
The reason for so many speed changes in the PTP motions is because the plugin tries to approximate the speed set in the Grasshopper targets, which is defined in mm/s, on joint movements as well, this means setting a different leading axis speed for each target. |
Beta Was this translation helpful? Give feedback.
-
|
Ok, thank you for your answers! |
Beta Was this translation helpful? Give feedback.
-
|
@toniosterlund, loading tools and frames directly from the controller has been added to the latest version. See this comment for details: #154 (comment) |
Beta Was this translation helpful? Give feedback.
-
|
هلا كيف يمكنني أن اتعلم ؟ |
Beta Was this translation helpful? Give feedback.
Hi @toniosterlund, as you say, if you don't want your robot library to be publicly available, currently the solution would be to create locally the 3dm/xml files placed under the User/Robots/ folder (Documents/Robots in Windows) and distribute these files to other machines, asking the users to copy them to this same location. If you change these files, they will have to copy them again.
We could add additional folder locations to check for libraries, these could point to a network drive. We could also add a feature to load a robot system from internalized text and a list of meshes per mechanism.
If you are in a commercial setting, are finding the plugin useful, and can afford it, consider…